|
|
|
Ultrasonic Sensor
We use Two Devantech SRF04 Ultrasonic Range Finder sensors. It offers precise ranging information from roughly 3 cm to 3 meters. We put the 2 sensors back to back to speed up scanning process.
The ranger works by transmitting a pulse of sound outside the range of human hearing. This pulse travels at speed of sound (roughly 340 m/s) away from the ranger in a cone shape and the sound reflects back to the ranger from any object in the path of this sonic wave. The ranger pauses for a brief interval after the sound in the form of an echo .the controller driving the ranger then requests a ping, the ranger creates the sound pulse, and waits for the return echo. If received, the ranger reports this echo to the controller and the controller can then compute the distance to the object based on the elapsed time. There is couple of requirements for the input trigger and output pulse generated by the ranger. The input line should be held low (logic 0) and then brought high for a minimum of 10usec to initiate the sonic pulse. The pulse is generated on falling edge of this input trigger. The ranger’s receive circuitry is held in a short blanking interval of 100usec to avoid noise from the initial ping and then it is enabled to listen for the echo. The echo line is low until reception is enabled. Once the receive circuitry is enabled, the falling edge of the echo line signals either an echo detection or the time out (if no object echo is detected). Microcontroller will want to begin timing on the falling edge of the trigger Input and end timing on the falling edge of the echo received from the object. If no object is detected, the pulse will timeout and return an echo at approximately 36 msec.
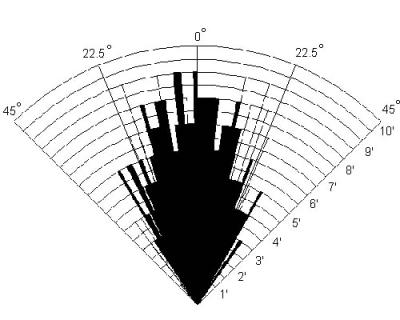
The SRF04 has a detection cone that is roughly 30 degree wide. Testing in a 90-degree arc revealed the following beam pattern:
|
|
Copyright © 2002 [
smart-car.tripod.com ]. All rights reserved. |